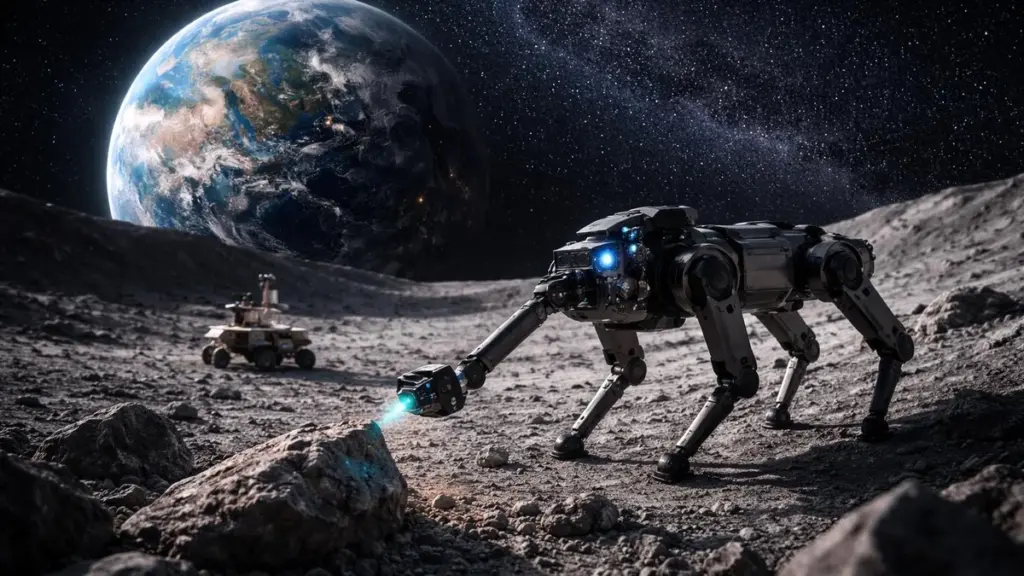
Un robot quadrupede sta facendo riflettere gli ingegneri spaziali: si muove più velocemente dei classici rover ed esegue analisi geologiche precise in totale autonomia.
In un ambiente di test che riproduce i paesaggi lunari e marziani, il robot ANYmal dimostra quanto più rapide e intelligenti potrebbero diventare le missioni future. Prendendo decisioni in autonomia ed esaminando le rocce direttamente sul posto, riesce a completare in pochi minuti ciò che i rover tradizionali impiegano talvolta quasi tre quarti d'ora a portare a termine.
Perché le agenzie spaziali hanno bisogno urgente di robot più veloci
I rover attualmente in funzione su Marte sono gioielli tecnologici, ma incredibilmente lenti. In una buona giornata percorrono qualche centinaio di metri — non perché i motori siano deboli, bensì a causa della distanza dalla Terra. Un segnale di comando può impiegare fino a 22 minuti per arrivare, e altrettanto per tornare indietro. Ogni curva, ogni trivellazione, ogni scatto fotografico richiede una pazienza enorme.
Sulla Luna la situazione è diversa, ma non meno complicata. Le comunicazioni sono più rapide, eppure la superficie è costellata di crateri, pendii detritici e rocce affilate. Le ruote si incastrano, slittano o si danneggiano. Un veicolo con zampe ha un vantaggio immediato in questi contesti. Ed è esattamente qui che entra in gioco ANYmal: un cane-robot appositamente progettato per terreni extraterrestri ostili e accidentati.
Spostando maggiore autonomia direttamente sulla superficie della Luna e di Marte, si elimina gran parte del tempo di attesa tra essere umano e macchina.
ANYmal: il cane-robot con un fiuto scientifico straordinario
ANYmal è stato sviluppato presso l'ETH di Zurigo e misura circa un metro di lunghezza. Si regge su quattro zampe articolate che si muovono indipendentemente l'una dall'altra. Grazie a questa struttura, scavalca le pietre, risale piccoli gradini rocciosi e riacquista rapidamente l'equilibrio quando il terreno cede. Dove un rover a ruote si ferma o deve aggirare un ostacolo, ANYmal trova semplicemente un nuovo appoggio.
Strumenti scientifici su un braccio robotico
Per i test in ambiente spaziale simulato, il robot è stato dotato di un braccio aggiuntivo — una sorta di proboscide meccanica — in grado di avvicinarsi con precisione a rocce e pietre. All'estremità di questo braccio sono montati due compatti strumenti di misurazione:
- MICRO: una fotocamera microscopica che acquisisce immagini della superficie rocciosa a scala molto ridotta, con una risoluzione sufficiente a distinguere diversi tipi di minerali.
- Spettrometro Raman: un dispositivo portatile che utilizza un laser per dedurre la composizione di un campione analizzando le firme luminose riflesse.
Questa combinazione rappresenta un punto di forza decisivo per ANYmal: non è necessario raccogliere campioni, riporli e trasportarli in un laboratorio. L'analisi avviene direttamente sul posto, con risultati immediati per il team di missione.
Riconoscere le rocce come se le conoscesse da sempre
I test si sono svolti nel cosiddetto Laboratorio Marziano dell'Università di Basilea, un ambiente interno con pendii detritici, massi e composizioni del suolo simili a quelle riscontrabili su Marte o sulla Luna. All'interno di questo "paesaggio planetario" artificiale, ANYmal è riuscito a identificare diversi tipi di roccia.
Tra i minerali emersi dalle misurazioni figurano:
- Gesso — spesso associato ad ambienti ricchi d'acqua nel passato
- Carbonati — potenziali tracce di antichi ambienti acquatici
- Basalto — roccia ignea tipica dell'attività vulcanica
- Dunite — ricca di olivina, collegata agli strati profondi del mantello planetario
- Anortosite — caratteristica delle antiche zone crostali lunari
Per i ricercatori, questo tipo di informazione mineralogica è fondamentale. Fornisce indizi su dove sia stata presente l'acqua, sull'età di un determinato terreno e sulla potenziale rilevanza scientifica di un sito per indagini più approfondite.
In modalità autonoma ANYmal lavora tre volte più velocemente
Sotto la guida della ricercatrice Gabriela Ligeza — ora in forza all'Agenzia Spaziale Europea ESA — il team ha confrontato due diversi approcci operativi con il cane-robot. Il risultato è stato sorprendente.
Scenario 1: un operatore umano guida ogni singolo passo
Nel primo scenario, uno scienziato dirigeva il robot passo dopo passo. ANYmal riceveva un unico obiettivo, raggiungeva il punto, eseguiva le misurazioni e poi attendeva nuove istruzioni per il target successivo. Tra la selezione di ogni destinazione, l'invio dei comandi e la verifica dei risultati si inseriva costantemente una pausa.
Con questo approccio sono stati necessari 41 minuti per analizzare l'intero set di rocce. Una durata che può sembrare accettabile in laboratorio, ma tradotta in condizioni spaziali reali — con ritardi di comunicazione ed energia limitata — fa esplodere rapidamente qualsiasi pianificazione.
Scenario 2: il robot pianifica autonomamente il proprio percorso
Nel secondo scenario, ad ANYmal venivano indicati in una sola volta più punti di interesse. Dopodiché il software determinava autonomamente l'ordine di visita, sceglieva i percorsi attorno agli ostacoli e alternava automaticamente le fasi di cammino, puntamento, misurazione e spostamento.
Il risparmio di tempo è stato notevole: le stesse attività hanno richiesto soltanto dai 12 ai 23 minuti. L'operatore umano doveva intervenire molto meno frequentemente e, soprattutto, non era più necessario inviare un nuovo comando dopo ogni singola misurazione.
Con un approccio semi-autonomo, un robot quadrupede completa in un quarto d'ora ciò che una missione controllata in modo tradizionale porta a termine in quasi tre quarti d'ora.
Cosa può significare un cane-robot per la Luna
Per le future basi lunari, tutto ruota intorno alle risorse naturali. Il ghiaccio d'acqua nei crateri, i metalli negli strati rocciosi e i minerali per i materiali da costruzione rendono possibile una produzione locale, riducendo la dipendenza dai rifornimenti terrestri.
Un robot con zampe e strumentazione integrata può rivelarsi prezioso su tre fronti:
- Esplorazione rapida dei crateri: nelle zone polari dove potrebbe trovarsi ghiaccio, il robot deve muoversi in sicurezza lungo bordi scoscesi e pendii franosi.
- Mappatura locale delle zone di interesse: analizzando le rocce direttamente sul posto, si ottiene in tempi brevi una panoramica dei siti più promettenti per l'estrazione mineraria o la ricerca scientifica.
- Identificazione dei rischi: il robot può rilevare crepe nel suolo, grandi massi e zone instabili in anticipo rispetto alle missioni con equipaggio umano.
Con queste informazioni è possibile scegliere con maggiore precisione il sito di atterraggio e indirizzare gli astronauti verso le aree giuste, evitando di sprecare tempo prezioso in ricerche infruttuose.
Alla ricerca di tracce di vita su Marte
Su Marte la priorità si sposta dalle risorse verso il passato e l'eventuale presenza di vita. I ricercatori sono alla caccia di cosiddette biosignature: pattern chimici e mineralogici compatibili con processi biologici, come determinate molecole organiche o strutture particolari nelle rocce sedimentarie.
Lo spettrometro Raman montato su ANYmal è particolarmente adatto a individuare questi schemi. Illuminando una roccia con un laser, la luce riflessa produce una sorta di impronta digitale delle molecole presenti.
| Obiettivo della misurazione | Cosa fornisce lo spettrometro Raman |
|---|---|
| Individuare minerali correlati all'acqua | Segnali di solfati, carbonati e fasi di idratazione |
| Rilevare eventuali biosignature | Tracce di specifici composti organici o pattern nelle strutture del carbonio |
| Ricostruire la storia geologica | Informazioni sull'attività vulcanica, gli strati sedimentari e l'età delle rocce |
Analizzando più rocce in un'area in tempi più rapidi, una missione con durata operativa limitata può valutare con maggiore efficacia quali siti siano più promettenti per trivellazioni o raccolta di campioni da riportare sulla Terra.
Sciami di robot camminatori come scenario del futuro
ANYmal non è un caso isolato. Diversi gruppi di ricerca stanno sviluppando piccoli robot bipedi e quadrupedi capaci di operare in gruppo, come uno sciame, suddividendosi un'area più vasta. Un robot ispeziona il bordo di un cratere, un secondo esplora il fondo, un terzo esamina una sporgenza rocciosa poco più in là.
Condividendo i dati e coordinando reciprocamente i percorsi, questi team potrebbero mappare la superficie di un pianeta a velocità elevata. Le esperienze maturate con ANYmal mostrano che tre elementi sono assolutamente cruciali in questo processo:
- strutture quadrupede o multi-zampa capaci di affrontare qualsiasi ostacolo
- miniaturizzazione di strumenti di misurazione ad alte prestazioni
- software intelligente in grado di prendere decisioni locali, senza una guida costante dalla Terra
Cosa significa tutto questo per le missioni future?
Per agenzie spaziali come ESA e NASA la domanda diventa sempre più urgente: quali compiti pianificare ancora dalla Terra e quali affidare a robot autonomi sulla Luna o su Marte? Una maggiore indipendenza operativa in loco richiede algoritmi affidabili capaci di gestire situazioni impreviste, come una parete rocciosa che crolla o una duna di sabbia diversa da quanto previsto dai modelli.
Al tempo stesso, questa autonomia genera un risparmio di energia e tempo significativo. Meno attese per i comandi significa un utilizzo più efficiente dei pannelli solari e delle batterie — un fattore che può rivelarsi decisivo durante le lunghe missioni notturne polari sulla Luna.
Per chi si chiede se un cane-robot potrebbe un giorno camminare accanto a un astronauta: tecnicamente parlando, questo scenario è sempre più a portata di mano. Si pensi a situazioni in cui un essere umano definisce le linee generali di un'esplorazione mentre più robot compiono autonomamente piccole deviazioni, verificano campioni e scansionano in anticipo le zone di terreno più pericolose.
Le applicazioni non si limitano all'esplorazione spaziale. Le tecnologie per l'equilibrio, la navigazione autonoma e i sensori robusti stanno diventando interessanti anche per le missioni di ricerca e soccorso sulla Terra, per le ispezioni in miniera o per l'esplorazione di zone vulcaniche inaccessibili all'essere umano. In questo senso, l'ambiente lunare e marziano funge da laboratorio di prova definitivo per una nuova generazione di robot da terreno.